Bézierova křivka
 Bézierova křivka, nesprávným pravopisem Beziérova křivka, pojmenovaná po
francouzském inženýru Pierru Bézierovi, je jednou z mnoha parametrických
křivek. Umožňuje interaktivní vytváření a modifikaci jejího tvaru. Pomocí
Bézierovy křivky je také možno reprezentovat i interpolační křivky.
Bézierova křivka, nesprávným pravopisem Beziérova křivka, pojmenovaná po
francouzském inženýru Pierru Bézierovi, je jednou z mnoha parametrických
křivek. Umožňuje interaktivní vytváření a modifikaci jejího tvaru. Pomocí
Bézierovy křivky je také možno reprezentovat i interpolační křivky.
Racionální Bézierova křivka
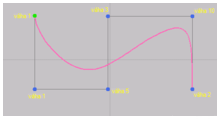 Jak napovídá název, jedná se o zobecnění Bézierových křivek. Pokud chce uživatel
změnit tvar Bézierovy křivky, tak musí vybrat příslušný řídící bod a změnit
jeho polohu. To nemusí být vždy jednoduché a vyžadujete jistou zkušenost.
Tento problém se navíc komplikuje, pracujeme-li v třírozměrném prostoru. Přirozenou
se potom jeví metoda, která každému bodu řídicího polygonu přiřadí reálné číslo
(„váha“), jehož změnou se mění tvar křivky. Největším přínosem racionálních
Bézierových křivek je možnost manipulace s tvarem křivky bez změny polohy bodů
řídicího polygonu.
Jak napovídá název, jedná se o zobecnění Bézierových křivek. Pokud chce uživatel
změnit tvar Bézierovy křivky, tak musí vybrat příslušný řídící bod a změnit
jeho polohu. To nemusí být vždy jednoduché a vyžadujete jistou zkušenost.
Tento problém se navíc komplikuje, pracujeme-li v třírozměrném prostoru. Přirozenou
se potom jeví metoda, která každému bodu řídicího polygonu přiřadí reálné číslo
(„váha“), jehož změnou se mění tvar křivky. Největším přínosem racionálních
Bézierových křivek je možnost manipulace s tvarem křivky bez změny polohy bodů
řídicího polygonu.
PŘÍKLADY:
- Lineární Bézierova křivka (n = 1)
Dva kontrolní body P0 a P1 určují lineární Bézierovu křivku, která odpovídá úsečce mezi těmito dvěma body.
- Kvadratická Bézierova křivka (n = 2)
je dráha, která je popsána funkcí C(t) pro body P0, P1 a P2
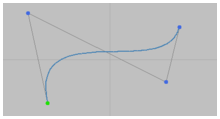
- Kubická Bézierova křivka (n = 3)
Čtyři body (P0, P1, P2 a P3) určují kubickou Bézierovu křivku. Křivka začíná v bodě P0 a pokračuje směrem P1 a dále směrem na P2 a P3. Obecně křivka skrz body P1 a P2 neprochází – tyto body určují pouze tvar křivky, přičemž P1 určuje směr, kterým křivka z bodu P0 vychází. P2 určuje směr, kterým se křivka přibližuje k bodu P3. Vzdálenost mezi body P0, P1 a mezi body P2, P3 určuje „jak dlouho“ se křivka pohybuje ve směru kontrolního bodu P1 a P2, před tím než se stočí ve směru bodu P3.