Bézierova křivka
Bézierova křivka, nesprávným pravopisem Beziérova křivka, pojmenovaná po francouzském inženýru Pierru Bézierovi, je jednou z mnoha parametrických křivek. Umožňuje interaktivní vytváření a modifikaci jejího tvaru. Pomocí Bézierovy křivky je také možno reprezentovat i interpolační křivky (existují například algoritmy na převod mezi interpolačními spline kubikami a B-spline kubikami resp. Bézier kubikami).
Racionální Bézierova křivka jak napovídá název, jedná se o zobecnění Bézierových křivek. Pokud chce uživatel změnit tvar Bézierovy křivky, tak musí vybrat příslušný řídící bod a změnit jeho polohu. To nemusí být vždy jednoduché a vyžadujete jistou zkušenost. Tento problém se navíc komplikuje, pracujeme-li v třírozměrném prostoru. Přirozenou se potom jeví metoda, která každému bodu řídicího polygonu přiřadí reálné číslo („váha“), jehož změnou se mění tvar křivky. Největším přínosem racionálních Bézierových křivek je možnost manipulace s tvarem křivky bez změny polohy bodů řídicího polygonu
- Lineární Bézierovy křivky (n = 1) Dva kontrolní body P0 a P1 určují lineární Bézierovu křivku, která odpovídá úsečce mezi těmito dvěma body.
- Kvadratické Bézierovy křivky (n = 2) Kvadratická Bézierova křivka je dráha, která je popsána funkcí C(t) pro body P0, P1 a P2:
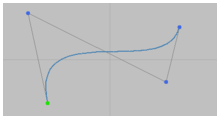
- Kubické Bézierovy křivky (n = 3) Kubické Bézierovy křivky mají velký význam pro praxi, protože jsou skládány z menších dílů, kde můžeme jednoduše definovat spojitost v řídících (koncových) bodech jednotlivých segmentů. Další výhodou je omezený vliv změny polohy jednoho bodu na tvar celé křivky. Pro rasterizaci Beziérovy křivky se většinou používá adaptivní algoritmus de Casteljau.
Čtyři body (P0, P1, P2 a P3) určují kubickou Bézierovu křivku. Křivka začíná v bodě P0 a pokračuje směrem P1 a dále směrem na P2 a P3. Obecně křivka skrz body P1 a P2 neprochází – tyto body určují pouze tvar křivky, přičemž P1 určuje směr, kterým křivka z bodu P0 vychází. P2 určuje směr, kterým se křivka přibližuje k bodu P3. Vzdálenost mezi body P0, P1 a mezi body P2, P3 určuje „jak dlouho“ se křivka pohybuje ve směru kontrolního bodu P1 a P2, před tím než se stočí ve směru bodu P3.
Racionální Bézierova křivka jak napovídá název, jedná se o zobecnění Bézierových křivek. Pokud chce uživatel změnit tvar Bézierovy křivky, tak musí vybrat příslušný řídící bod a změnit jeho polohu. To nemusí být vždy jednoduché a vyžadujete jistou zkušenost. Tento problém se navíc komplikuje, pracujeme-li v třírozměrném prostoru. Přirozenou se potom jeví metoda, která každému bodu řídicího polygonu přiřadí reálné číslo („váha“), jehož změnou se mění tvar křivky. Největším přínosem racionálních Bézierových křivek je možnost manipulace s tvarem křivky bez změny polohy bodů řídicího polygonu
- Lineární Bézierovy křivky (n = 1) Dva kontrolní body P0 a P1 určují lineární Bézierovu křivku, která odpovídá úsečce mezi těmito dvěma body.
- Kvadratické Bézierovy křivky (n = 2) Kvadratická Bézierova křivka je dráha, která je popsána funkcí C(t) pro body P0, P1 a P2:
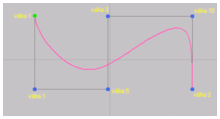
- Kubické Bézierovy křivky (n = 3) Kubické Bézierovy křivky mají velký význam pro praxi, protože jsou skládány z menších dílů, kde můžeme jednoduše definovat spojitost v řídících (koncových) bodech jednotlivých segmentů. Další výhodou je omezený vliv změny polohy jednoho bodu na tvar celé křivky. Pro rasterizaci Beziérovy křivky se většinou používá adaptivní algoritmus de Casteljau.
Čtyři body (P0, P1, P2 a P3) určují kubickou Bézierovu křivku. Křivka začíná v bodě P0 a pokračuje směrem P1 a dále směrem na P2 a P3. Obecně křivka skrz body P1 a P2 neprochází – tyto body určují pouze tvar křivky, přičemž P1 určuje směr, kterým křivka z bodu P0 vychází. P2 určuje směr, kterým se křivka přibližuje k bodu P3. Vzdálenost mezi body P0, P1 a mezi body P2, P3 určuje „jak dlouho“ se křivka pohybuje ve směru kontrolního bodu P1 a P2, před tím než se stočí ve směru bodu P3.